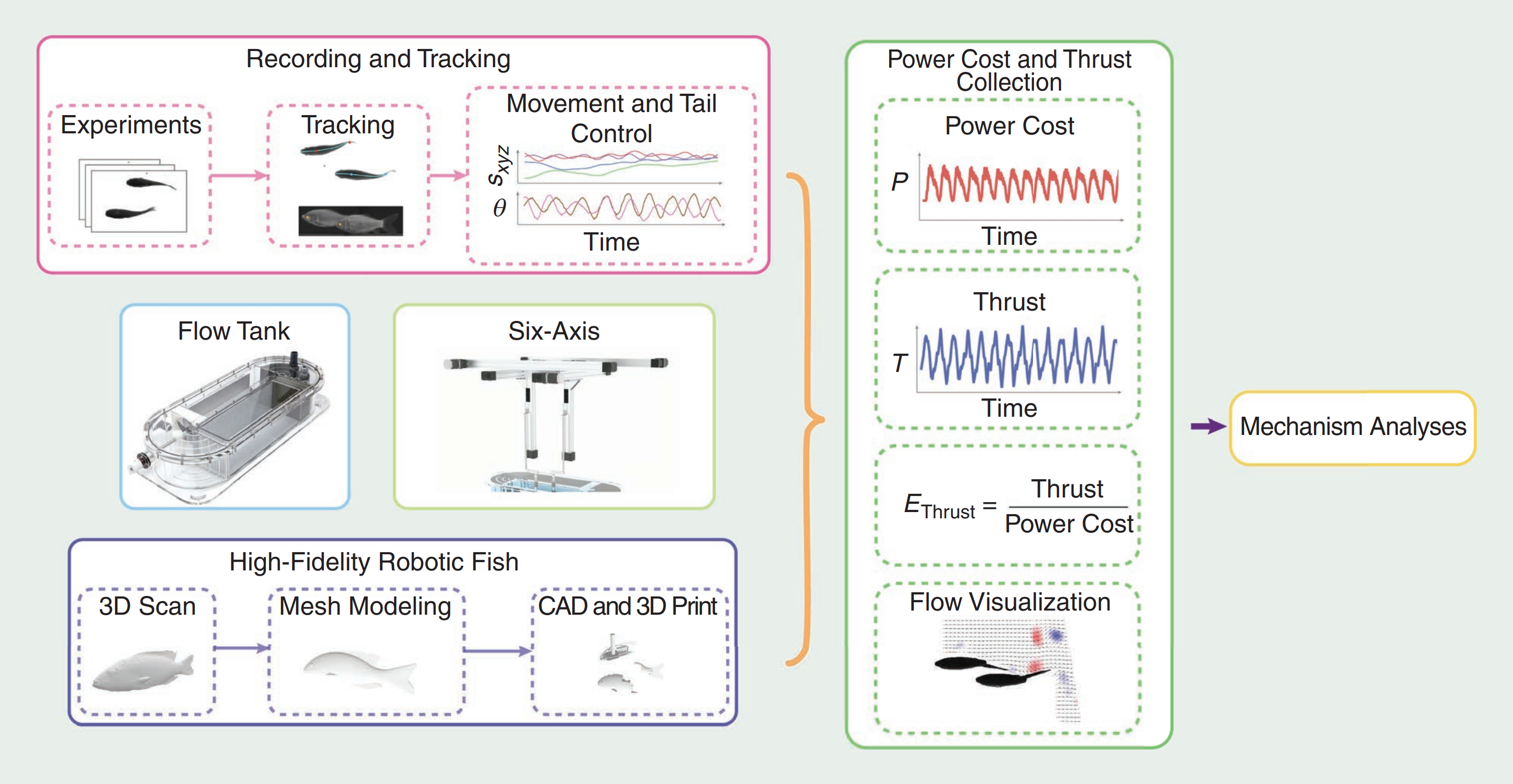
A schematic overview of our experiments and design of the RoboTwin platform. It includes a flow tank platform, a recording and tracking system, high-fidelity robotic fish models, a six-axis motion platform, and a power cost and thrust measuring system. All of these ensure that our robotic twins can replay the schooling behavior of real fish, including morphology, movements, and kinematics. Power costs, thrust, thrust efficiency, and flow visualization of the hydrodynamic interaction are collected for further behavioral analysis.
Material
Abstract
By living and moving in groups, fish can gain many benefits, such as heightened predator detection, greater hunting efficiency, more accurate environmental sensing, and energy saving. Although the benefits of hydrodynamic interactions in schooling fish have drawn growing interest in fields such as biology, physics, and engineering, and multiple hypotheses for how such benefits may arise have been proposed, it is still largely unknown which mechanisms fish employ to obtain hydrodynamic benefits, such as increased thrust or improved movement efficiency. One main bottleneck has been the difficulty in collecting detailed sensory information, corresponding locomotory responses, and hydrodynamic information from real schooling fish.